
I am pursuing my Master's degree in Machine Learning at the University of Tübingen, Germany. I obtained my Bachelor's degree in Computer Science with Honours & Cum Laude (highest distinction) from the Delft University of Technology, Netherlands.
I desire to glimpse new ways of seeing machine learning, especially its capability to explain the underlying world mechanism, and its human-centric applications.
Warning
Problem: The current name of your GitHub Pages repository ("Solution: Please consider renaming the repository to "
http://".
However, if the current repository name is intended, you can ignore this message by removing "{% include widgets/debug_repo_name.html %}" in index.html.
Action required
Problem: The current root path of this site is "baseurl ("_config.yml.
Solution: Please set the
baseurl in _config.yml to "Education
-
 University of TübingenMSc in Machine LearningApr. 2024 - present
University of TübingenMSc in Machine LearningApr. 2024 - present -
 Delft University of TechnologyBSc in Computer ScienceSep. 2020 - Jul. 2023
Delft University of TechnologyBSc in Computer ScienceSep. 2020 - Jul. 2023
Honors & Awards
-
Amazon Future Engineer Scholarship2024
-
Deutschlandstipendium2024
-
Cum Laude - TU Delft2023
-
Honours Graduate - TU Delft2023
News
View AllWe release SMPLAug, a data augmentation library for robust human registration from 3D point clouds.
I have been awarded the Amazon Future Engineer Scholarship & Deutschlandstipendium.
I took a gap semester due to ankle surgery.
Selected Publications (view all )
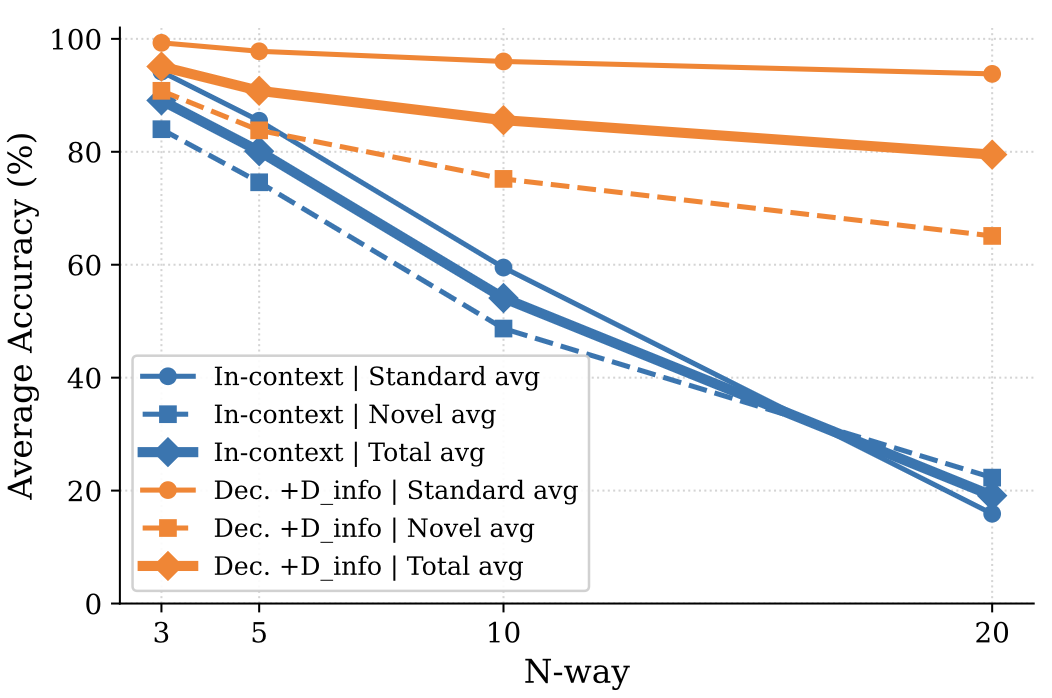
Decompose, Compare, and Decide: Multimodal LLMs are Implicit Few-Shot Learners
Anonymous submission
Anonymous submission 2026
Decompose, Compare, and Decide: Multimodal LLMs are Implicit Few-Shot Learners
Anonymous submission
Anonymous submission 2026

Investigation of Architectures and Receptive Fields for Appearance-based Gaze Estimation
Yunhan Wang, Xiangwei Shi, Shalini De Mello, Hyung Jin Chang, Xucong Zhang
arXiv, Technical Report 2023
Investigation of Architectures and Receptive Fields for Appearance-based Gaze Estimation
Yunhan Wang, Xiangwei Shi, Shalini De Mello, Hyung Jin Chang, Xucong Zhang
arXiv, Technical Report 2023
All publications
Selected Projects (view all )
SMPL2Biomechanics
2024
SMPL2Biomechanics is pipeline for estimating human biomechanical data (ground reaction force, joint torque) using the SMPL body model and AMASS motion datasets. The system employs inverse kinematics and inverse dynamics through the CusToM library to extract biomechanical parameters and biomechanical key points are mapped from the SKEL skeleton model. SMPL2Biomechanics enables comprehensive analysis and modeling of human motion dynamics at scale.
SMPL2Biomechanics
2024
SMPL2Biomechanics is pipeline for estimating human biomechanical data (ground reaction force, joint torque) using the SMPL body model and AMASS motion datasets. The system employs inverse kinematics and inverse dynamics through the CusToM library to extract biomechanical parameters and biomechanical key points are mapped from the SKEL skeleton model. SMPL2Biomechanics enables comprehensive analysis and modeling of human motion dynamics at scale.
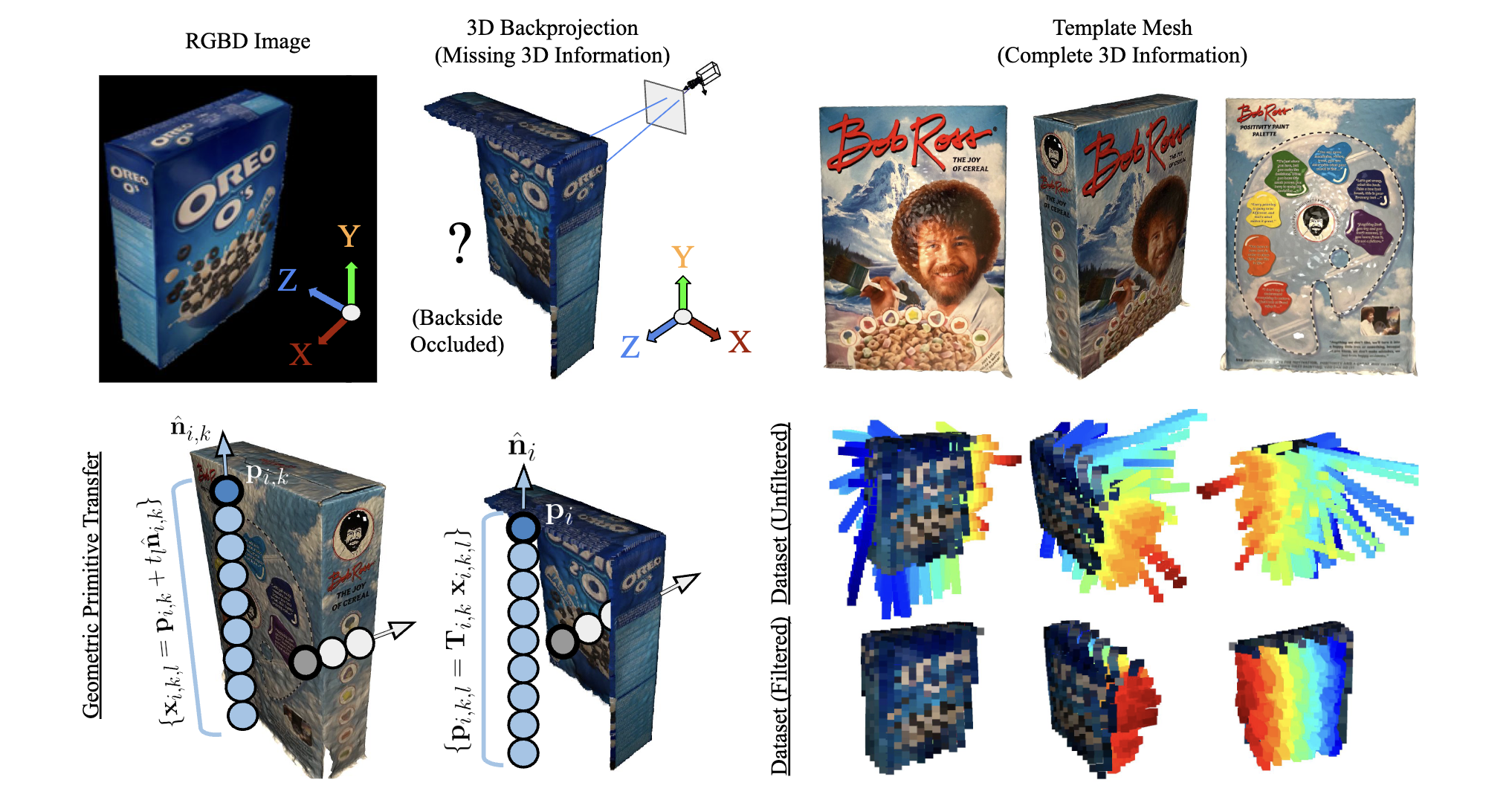
Probabilistic 3D Reconstruction from Single RGBD Image
2024
This projects builds a probabilistic ensemble of 3D reconstructions of an object from a single RGBD image. It uses geometric primitives from a template mesh to generate a dataset, fits a Gaussian Process (GP), and samples from its posterior. This successfully captures and represents the geometric uncertainty in occluded regions.
Probabilistic 3D Reconstruction from Single RGBD Image
2024
This projects builds a probabilistic ensemble of 3D reconstructions of an object from a single RGBD image. It uses geometric primitives from a template mesh to generate a dataset, fits a Gaussian Process (GP), and samples from its posterior. This successfully captures and represents the geometric uncertainty in occluded regions.